KCP 源码分析与原理总结
序言
本文很大部分参考了 详解 KCP 协议的原理和实现,非常感谢该文作者的讲解。本文再此基础上,加入了一些笔者的思考和分析图示,以期更好地理解 KCP 的底层原理。
结论先行
KCP 是一个快速可靠协议,能以比 TCP 浪费 10%-20% 的带宽的代价,换取平均延迟降低 30%-40%,且最大延迟降低三倍的传输效果。
TCP 是为流量设计的(每秒内可以传输多少 KB 的数据),讲究的是充分利用带宽。而 KCP 是为流速设计的(单个数据包从一端发送到一端需要多少时间),以 10%-20% 带宽浪费的代价换取了比 TCP 快 30%-40% 的传输速度。TCP 信道是一条流速很慢,但每秒流量很大的大运河,而 KCP 是水流湍急的小激流。
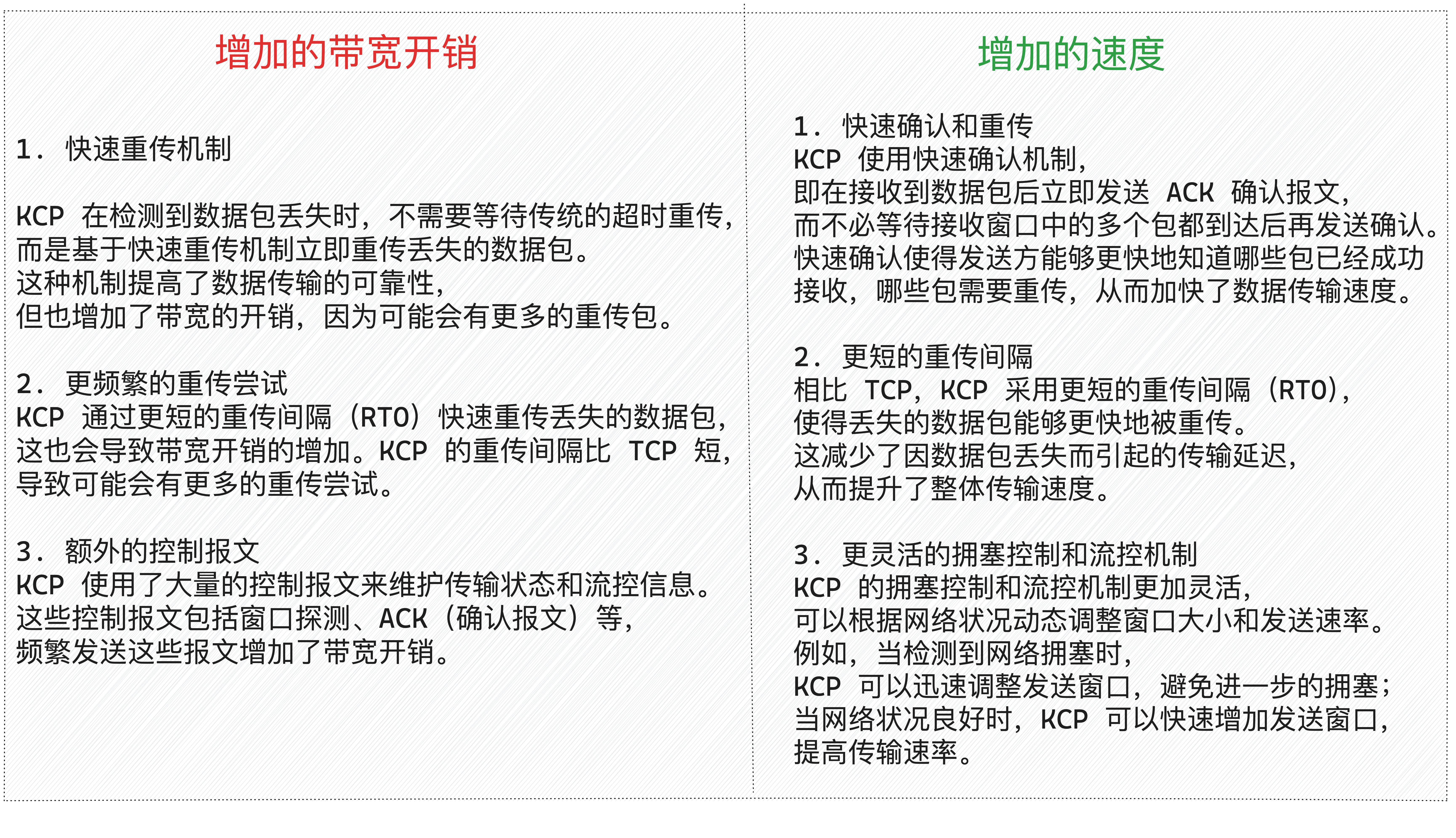
KCP 增加的带宽在哪里?增加的速度又在哪里?
KCP 核心特性
快速重传: KCP支持快速重传机制,不像 TCP 那样依赖超时重传。KCP 可以根据接收方返回的确认信息快速判断哪些数据包已经丢失,并迅速进行重传。
选择性确认(Selective Acknowledgment, SACK): KCP 支持 SACK,这允许接收端告知发送端哪些包已经收到,从而仅重传未被确认接收的数据包,减少不必要的重传。
无连接操作: 基于 UDP 的实现使得 KCP 在传输数据前不需要像 TCP 那样进行三次握手建立连接,这减少了初始的延迟,并使其能在连接性较差的网络环境下更加灵活和快速。
拥塞控制: KCP 实现了类似 TCP 的拥塞控制算法,但更为简化,能够快速适应网络条件的变化,如带宽波动和丢包。
流量控制: KCP 允许调整发送和接收的窗口大小,使得发送方可以根据接收方的处理能力和网络条件调整数据发送速率,优化网络利用率和减少拥塞。
可配置的传输策略: KCP 允许用户根据应用需求调整内部参数,如传输间隔、窗口大小等,以达到最优的传输效率和延迟。
前向错误校正(Forward Error Correction, FEC): KCP 还可以结合使用 FEC 技术,通过发送额外的冗余数据来恢复丢失的包,进一步提高在高丢包环境下的数据传输可靠性。
为什么 TCP 做不到 KCP 这样?
TCP 作为一种成熟且广泛使用的传输协议,在设计上注重可靠性和通用性,因此在拥塞控制和流量控制方面相对保守,以确保在各种网络条件下都能稳定运行。然而,这些设计上的保守性也导致了 TCP 在某些情况下的灵活性和自适应性不如 KCP。
| 特性类别 | 协议 | 描述 |
|---|---|---|
| 拥塞控制机制 | TCP | 固定算法(慢启动、拥塞避免等),保守的调整策略(指数和线性增长) |
| KCP | 灵活算法,动态调整策略,快速调整窗口大小 | |
| 重传机制的延迟 | TCP | 固定重传间隔(RTO),多次确认触发重传,需要主动开启选择性重传(SACK) |
| KCP | 快速重传,选择性重传,减少重传延迟 | |
| 流量控制 | TCP | 固定流量控制(依赖接收窗口和发送窗口),通用性设计 |
| KCP | 自适应流量控制,应用层反馈调整发送窗口和重传策略 | |
| 应用场景 | TCP | 广泛应用于各种网络环境,标准化要求高 |
| KCP | 优化特定场景(如高丢包率和高延迟网络),灵活实现 |
1. 拥塞控制机制的固定性
TCP:
- 固定算法:TCP 的拥塞控制算法,如慢启动(Slow Start)、拥塞避免(Congestion Avoidance)、快速重传(Fast Retransmit)和快速恢复(Fast Recovery),在设计时考虑了广泛的兼容性和可靠性。这些算法虽然有效,但其调整机制相对固定,响应速度较慢。
- 保守的调整策略:TCP 的拥塞控制算法采用了保守的调整策略,例如指数增长和线性增长,这在高丢包率或高延迟网络中,可能会导致拥塞窗口(cwnd)增长速度较慢,影响传输效率。
KCP:
- 灵活算法:KCP 的拥塞控制机制更为灵活,可以根据实时网络状况进行快速调整。例如,KCP 的快速重传和选择性重传机制,使其能更快速地响应网络丢包情况。
- 动态调整策略:KCP 的拥塞窗口调整更为灵活,可以根据网络状况快速增加或减少窗口大小,提高传输效率。
2. 重传机制的延迟
TCP:
- 固定重传间隔:TCP 使用固定的重传超时(RTO),并随着每次重传逐渐增加(指数回退),这种保守的重传机制在高延迟和高丢包率网络中可能导致重传延迟较长。
- 多次确认触发重传:TCP 的快速重传需要等待三个重复的 ACK 才能触发,这在丢包率较高的情况下,可能会导致较长的延迟。
KCP:
- 快速重传:KCP 在检测到丢包后立即进行重传,而不需要等待多个重复的 ACK,这显著减少了重传延迟。
- 选择性重传:KCP 只重传丢失的数据包,而不是所有未确认的数据包,减少了不必要的重传开销。(TCP 其实也支持选择性重传 SACK)
3. 流量控制的灵活性
TCP:
- 固定流量控制:TCP 的流量控制主要依赖于接收窗口(rwnd)和发送窗口(swnd),在处理突发流量或变化较大的网络条件时,调整速度较慢。
- 通用性设计:TCP 作为一种通用协议,其设计必须兼顾各种网络环境,因此在流量控制上相对保守,以确保在任何环境下都能稳定运行。
KCP:
- 自适应流量控制:KCP 的流量控制机制可以根据实际应用需求进行更细粒度的调整。例如,KCP 可以根据延迟抖动、丢包率等动态参数调整发送速率,确保在不同网络条件下都能保持高效传输。
- 应用层反馈:KCP 可以根据应用层的实时反馈,动态调整发送窗口和重传策略,进一步优化传输效率。
4. 应用场景的差异
TCP:
- 广泛应用:TCP 设计用于广泛的网络环境,包括稳定的有线网络和不稳定的无线网络,因此其机制必须足够通用和保守,保证在各种情况下的可靠性。
- 标准化要求:作为互联网的基础协议,TCP 的各项机制经过严格标准化,任何修改都需要广泛测试和验证,以确保不会影响现有网络的稳定性。
KCP:
- 特定优化:KCP 设计初衷是优化特定场景下的传输性能,特别是高丢包率和高延迟网络,因此在设计上更加灵活,能够根据实时网络状况进行调整。
- 灵活实现:KCP 可以根据具体应用需求进行优化,例如在实时通信和在线游戏等场景中,灵活的流量控制和快速重传机制显著提升了传输效率。
结论
虽然 TCP 在拥塞控制和流量控制方面具备基本的动态调整能力,但其保守的设计和标准化要求使得其在高丢包率和高延迟网络中的适应性和灵活性不如 KCP。KCP 通过灵活的拥塞控制、快速重传和自适应流量控制机制,能够更有效地应对不同网络条件下的传输需求,提供更高效的传输性能。
KCP 一定比 TCP 快吗?
不一定。KCP 并不一定在所有情况下都比 TCP 快。虽然 KCP 在某些特定网络环境(如高丢包率和高延迟的网络)中表现更优异,但在某些情况下,TCP 可能更合适。
1. 网络环境
高丢包率和高延迟网络:
- KCP:KCP 通过快速重传和选择性重传机制,以及动态调整的窗口和重传间隔,能够更好地应对高丢包率和高延迟网络,减少传输延迟,提高传输效率。
- TCP:TCP 的重传机制和保守的拥塞控制在这种环境中可能导致较高的延迟和较低的带宽利用率。
低丢包率和低延迟网络:
- KCP:在稳定的低丢包率和低延迟网络中,KCP 的频繁重传和控制报文可能会导致额外的带宽开销,未必有明显的性能优势。
- TCP:TCP 在这种环境中表现稳定,且由于其带宽开销较小,可能比 KCP 更高效。
2. 带宽利用率
带宽充足的网络:
- KCP:KCP 由于其频繁的重传和控制报文,可能会占用更多的带宽,但如果带宽充足,这种开销对整体性能影响较小,且其低延迟优势可能更明显。
- TCP:TCP 的带宽利用率较高,适合带宽充足的环境。
带宽受限的网络:
- KCP:KCP 的额外带宽开销在带宽受限的网络中可能会显著影响整体传输效率。
- TCP:TCP 的较低带宽开销使其在带宽受限的环境中更有优势。
3. 应用场景
实时应用(如在线游戏、视频会议):
- KCP:KCP 的低延迟和快速响应能力使其非常适合实时应用,在这些场景中,传输的及时性比带宽利用率更重要。
- TCP:TCP 在这些场景中的表现可能不如 KCP,特别是在高丢包率和高延迟的网络中。
非实时应用(如文件传输、网页浏览):
- KCP:KCP 在这些场景中可能不如 TCP 高效,特别是在网络稳定且带宽有限的情况下。
- TCP:TCP 的可靠性和高带宽利用率使其非常适合非实时应用。
4. 实现和配置
实现复杂性:
- KCP:实现和配置 KCP 可能比 TCP 更复杂,需要根据具体应用和网络环境进行优化和调整。
- TCP:TCP 是一个成熟的协议,系统和库的支持较好,配置和使用相对简单。
总结
KCP 在某些特定环境和应用场景中确实比 TCP 更快,尤其是高丢包率和高延迟的网络环境,以及对低延迟要求较高的实时应用。但在网络稳定、带宽有限或非实时应用场景中,TCP 可能表现更好。因此,选择使用 KCP 还是 TCP 应根据具体的网络条件和应用需求进行权衡。
前置准备
笔者不想那么快就贴出大段大段的代码进行分析,这可能会使读者不知所云。为了更好地阐述 KCP 的底层原理,笔者的设想是先对原理部分进行概要总结,然后再带着这些结论去分析源码,进一步填充里面的边角细节。
但是呢,为了更好地理解 KCP 的原理,又不得不对涉及源码的一些重要设计,为了避免在原理分析阶段,对源码进行过多的涉及,笔者决定添加这单独的一章内容,对 KCP 的“接口设计”、“报文段”、“KCP 控制块”以及“队列和缓冲区”先进行简要概述,以辅助读者更好地理解后续的内容。
接口设计
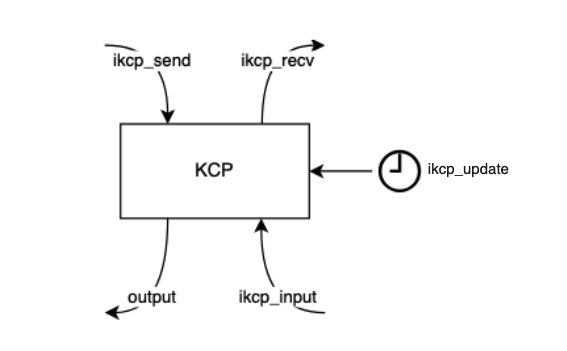
在 kcp.h 文件中,定义了 KCP 最核心的几个接口:
1 | |
ikcp_create:conv: 会话标识符,用于标识两个端点之间的连接。这个标识符在两个通信端点之间必须一致。user: 用户数据指针,可以传递任意用户数据,这个数据在 KCP 的output回调中会被传递回去。- 返回值: 一个指向新创建的 KCP
控制块(
ikcpcb)的指针。
ikcp_release: 释放一个 KCP 控制对象。ikcp_setoutput: 设置 KCP 的输出回调函数。output: 输出回调函数指针。这个回调函数在 KCP 需要发送数据时被调用。buf: 要发送的数据缓冲区。len: 数据长度。kcp: 当前的 KCP 对象。user: 用户数据。
通过这个回调,KCP 可以将要发送的数据传递给下层的网络层,比如 UDP 套接字。
ikcp_recv: 从 KCP 的接收队列中接收数据。kcp: KCP 控制对象的指针。buffer: 用户提供的缓冲区,用于存储接收到的数据。len: 缓冲区的长度。- 返回值: 成功接收的数据大小;如果没有数据可接收,返回负值(例如,EAGAIN)。
这个函数用于上层从 KCP 中读取数据。
ikcp_send: 向 KCP 的发送队列中添加数据。kcp: KCP 控制对象的指针。buffer: 要发送的数据缓冲区。len: 数据的长度。- 返回值: 成功发送的数据大小;如果发送失败,返回负值。
这个函数用于上层向 KCP 发送数据,KCP 会管理这些数据并负责其可靠传输。
ikcp_update: 更新 KCP 的内部状态,通常需要定期调用。kcp: KCP 控制对象的指针。current: 当前的时间戳(以毫秒为单位)。
这个函数负责处理 KCP 的超时、重传等操作,需要在一定的时间间隔内反复调用(通常每 10-100 毫秒)。
ikcp_input: 处理接收到的低层数据包(例如 UDP 包)。kcp: KCP 控制对象的指针。data: 收到的数据缓冲区。size: 数据的长度。- 返回值: 成功处理的数据大小;如果处理失败,返回负值。
ikcp_flush: 刷新待发送的数据。
其中最重要的是这 4 个:
ikcp_send: 将数据放在发送队列中等待发送。ikcp_recv: 从接收队列中读取数据。ikcp_input: 读取下层协议输入数据,解析报文段,如果是数据,就将数据放入接收缓冲区,如果是 ACK,就在发送缓冲区中标记对应的报文段已送达。ikcp_flush: 调用输出回调将发送缓冲区的数据发送出去。
这里就先简要介绍到这里,后面在源码分析篇章再对这些接口进行详细分析。
报文段
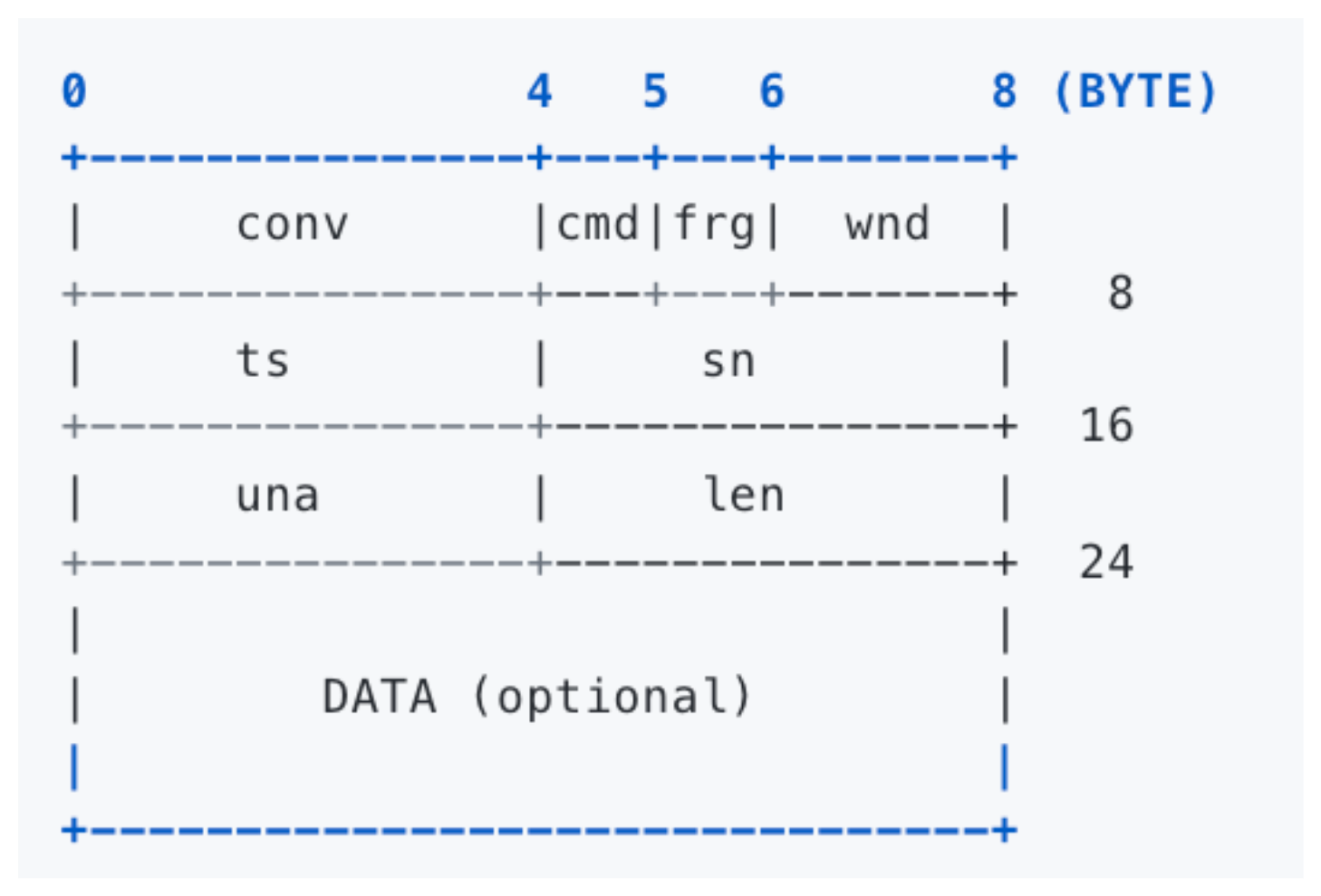
KCP 的报文段大小为 24 字节,结构如下图所示:
每个字段的含义如下:
conv: 连接标识cmd:报文类型frg:分片数量,表示随后还有多少个报文属于同一个包wnd:发送方剩余接收窗口的大小ts:时间戳sn:报文编号una:发送方的接收缓冲区中最小还未收到的报文段的编号,也就是说,比它小的报文段都已全部接收len:数据段长度data:数据段,只有数据报文会有这个字段
其中 cmd 共有 4 种报文类型:
- 数据报文:IKCP_CMD_PUSH
- 确认报文:IKCP_CMD_ACK
- 窗口探测报文:IKCP_CMD_WASK 询问对端剩余接收窗口的大小
- 窗口通知报文:IKCP_CMD_WINS 通知对端剩余接收窗口的大小
在 KCP 中,报文段结构定义在 kcp.h 文件中,如下:
1 | |
IKCPSEG 结构还多出了几个字段,这是为了支持 KCP
协议的可靠性和效率:
resendts: 记录报文的下次重传时间,用于实现重传机制。如果报文在一定时间内没有被确认收到,就会在这个时间戳之后被重新发送。rto: 表示当前报文的重传超时时间(RTT 的估计值)。用于计算每个报文的重传时间,如果超过rto时间没有收到 ACK,会触发重传。fastack: 快速重传计数,记录该报文被跳过的次数。如果一个报文的 ACK 连续接收到多个对同一报文的确认,而不是新的报文,会增加这个计数,用于实现快速重传机制。xmit: 记录报文已经被发送的次数。用于统计一个报文的重传次数,帮助判断传输的可靠性。如果操作dead_link次,则会判断为连接失效,KCP 会断开连接。node: 链表节点,用于将多个IKCPSEG结构体链接在一起。KCP 的队列和缓冲区都是循环双链表结构。
这些字段共同作用,帮助 KCP 实现以下功能:
- 可靠性:通过
sn、una和ack确保数据包按顺序接收和重传。 - 流量控制:通过
wnd控制数据流量,避免接收方过载。 - 高效传输:通过
resendts和rto进行超时和重传控制,fastack提供快速重传机制。 - 灵活管理:使用链表节点
node组织数据,便于内部管理。
KCP 控制块 ikcpcb
上面我们提到的 ikcp_create 和 ikcp_release
就是对 KCP 控制块 ikcpcb 的创建和释放,每个 KCP
连接都对应一个 KCP 控制块。它定义在 kcp.h
中:
1 | |
字段的含义如下,读者可在后续分析过程回过来查阅:
| 字段名 | 含义 |
|---|---|
conv |
连接标识符,用于识别一个特定的会话。 |
mtu |
最大传输单元(Maximum Transmission Unit),表示网络层传输数据包的最大字节数。 |
mss |
最大报文段长度(Maximum Segment Size),表示应用层传输数据的最大字节数。 |
state |
连接状态,标识当前的传输状态。 |
snd_una |
未确认的发送序号,表示最早未确认的包的序号。 |
snd_nxt |
下一个发送序号,表示即将发送的包的序号。 |
rcv_nxt |
下一个接收序号,表示期望接收的下一个包的序号。 |
ts_recent |
最近的时间戳,用于延迟测量。 |
ts_lastack |
最近的确认时间戳,用于 RTT 计算。 |
ssthresh |
拥塞避免的慢启动阈值。 |
rx_rttval |
RTT 的偏差,用于计算 RTT 的波动。 |
rx_srtt |
平滑的 RTT 值,用于计算平均 RTT。 |
rx_rto |
重新传输超时时间,根据 RTT 动态调整。 |
rx_minrto |
最小的重新传输超时时间。 |
snd_wnd |
发送窗口大小,控制发送流量的窗口。 |
rcv_wnd |
接收窗口大小,控制接收流量的窗口。 |
rmt_wnd |
远端窗口大小,表示对方接收窗口的大小。 |
cwnd |
拥塞窗口大小,控制发送流量的窗口,用于拥塞控制。 |
probe |
探测标志,表示是否需要进行窗口探测。 |
current |
当前的时间戳。 |
interval |
刷新间隔时间,表示定期刷新 KCP 状态的间隔。 |
ts_flush |
下次刷新时间戳,用于确定何时执行下一次状态刷新。 |
xmit |
发送次数,表示数据包重传的次数。 |
nrcv_buf |
接收缓冲区的数据包数量。 |
nsnd_buf |
发送缓冲区的数据包数量。 |
nrcv_que |
接收队列中的数据包数量。 |
nsnd_que |
发送队列中的数据包数量。 |
nodelay |
延迟模式标志,表示是否启用无延迟模式。 |
updated |
更新标志,表示是否需要更新 KCP 状态。 |
ts_probe |
下次探测时间戳,用于窗口探测。 |
probe_wait |
探测等待时间,表示等待多长时间后进行下一次窗口探测。 |
dead_link |
死链标志,表示连接是否已经失效。 |
incr |
增量,用于控制流量的增加速率。 |
snd_queue |
发送队列,用于存储待发送的数据包。 |
rcv_queue |
接收队列,用于存储待处理的数据包。 |
snd_buf |
发送缓冲区,用于存储已经发送但未确认的数据包。 |
rcv_buf |
接收缓冲区,用于存储已经接收到但未处理的数据包。 |
acklist |
确认列表,用于存储待发送的确认序号。 |
ackcount |
确认计数,表示确认列表中的条目数量。 |
ackblock |
确认块大小,表示确认列表的内存分配大小。 |
user |
用户数据指针,用于存储用户自定义的数据。 |
buffer |
缓冲区,用于临时存储发送的数据。 |
fastresend |
快速重传标志,表示启用快速重传功能。 |
fastlimit |
快速重传限制,表示在一个 RTT 内允许的最大重传次数。 |
nocwnd |
无拥塞窗口控制标志,表示是否禁用拥塞窗口控制。 |
stream |
流模式标志,表示是否启用流模式。 |
logmask |
日志掩码,用于控制日志输出的级别。 |
output |
发送数据回调函数,用于发送数据。 |
writelog |
日志回调函数,用于输出日志。 |
队列和缓冲区
1 | |
KCP 中队列和缓冲区都是循环双链表,链表由宏实现,笔者并不擅长,所以本文就不探讨该链表的实现了,有数据结构基础的笔者应该很好理解这一块。

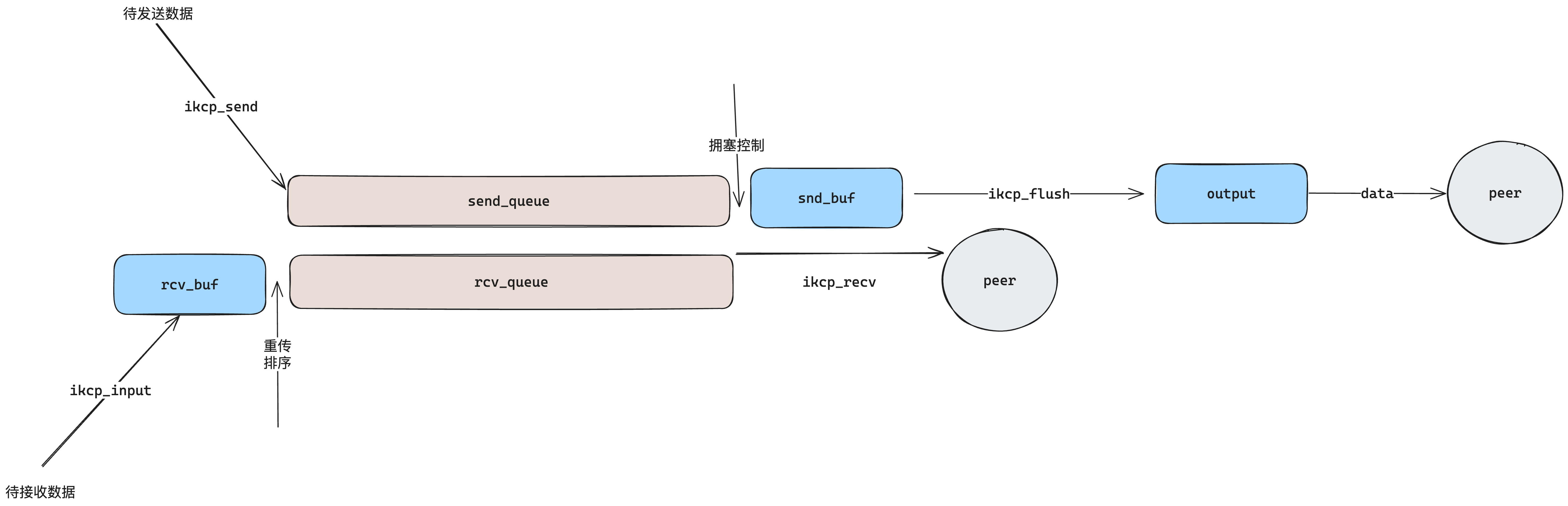
队列和缓冲区是 KCP 最核心的部分,它们的作用流程大概如下图所示,读者可以自行阅读尝试理解,后续我们会进行详细的分析。
原理分析
这一节我们详细讨论 KCP 的整个 ARQ 流程。首先我们会对整体流程进行简要概述,然后详细讨论滑动窗口中的发送和接收过程,接着讨论超时重传和快速重传,在这之后我们会将 KCP 和 TCP 的重传策略进行简单对比,最后介绍一下拥塞控制策略。
1. 整体流程
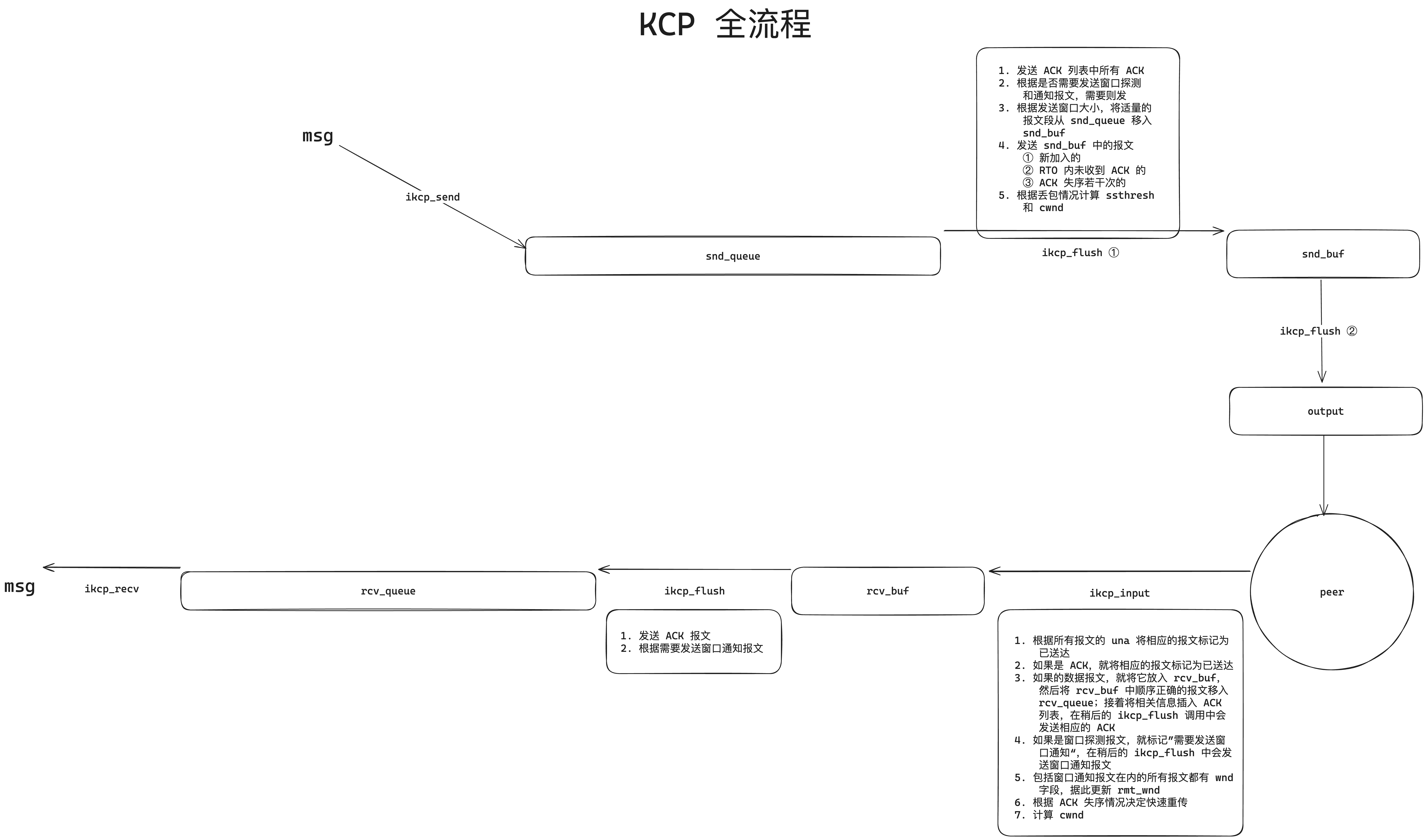
KCP 的全流程如上图所示:
- 发送方调用
ikcp_send将发送数据,这个时候会创建报文段实例,并放入snd_queue发送队列中。 - KCP 会定时调用
ikcp_update判断是否要调用ikcp_flush。 - 调用
ikcp_flush时会将合适的报文段放入snd_buf缓冲区中,具体包括:- 发送 ACK 列表中所有 ACK;
- 根据是否需要发送窗口探测和通知报文,需要则发;
- 根据发送窗口大小,将适量的报文段从
snd_queue移入snd_buf中; - 发送
snd_buf中的报文,包括新加入的、RTO 内未收到 ACK 的和 ACK 失序若干次的; - 根据丢包情况计算
ssthresh和cwnd。
- 发送的时候会调用由
ikcp_setoutput设置的回调函数,将数据发送到对端。 - 接收方收到数据后,会调用
ikcp_input,将数据放入rcv_buf缓冲区,具体包括:- 根据所有报文的 una 将相应的报文标记为已送达;
- 如果是 ACK,就将相应的报文标记为已送达;
- 如果是数据报文,就将它放入
rcv_buf,然后将rcv_buf中顺序正确的报文移入rcv_queue接收队列中,接着将相关信息插入 ACK 列表,在稍后的ikcp_flush中会发送相应的 ACK; - 如果是窗口探测报文,就标记“需要发送窗口通知”,在稍后的
ikcp_flush中会发送窗口通知报文; - 包括窗口通知报文在内的所有报文都有 wnd 字段,据此更新 rmt_wnd;
- 根据 ACK 失序情况决定是否进行快速重传;
- 计算 cwnd。
- 调用
ikcp_recv从rcv_queue中接收数据。
2. 滑动窗口
发送缓冲区 snd_buf 和接收缓冲区 rcv_buf
中活动的报文都是在滑动窗口之中的。这对于我们理解 KCP
的发送和接收流程非常重要,所有我们先从滑动窗口开始介绍。
滑动窗口实际是一个抽象的概念, 不能简单地认为它是缓冲区的一部分,准确的说,滑动窗口是由队列加缓冲区共同组成的。
2.1 发送
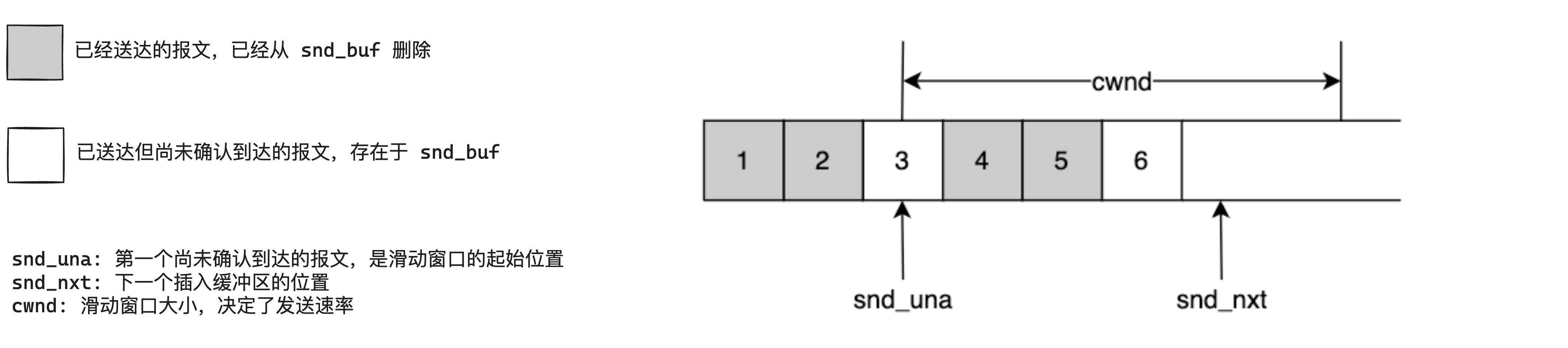
snd_una 和 snd_nxt
会努力往右移动:
ikcp_flush时,会从snd_queue中取出报文插入到snd_nxt的位置上;- 如果
snd_nxt - snd_una >= cwnd,则不允许新的报文插入; - 当
snd_una的 ACK 报文到达时,snd_una就会右移到第一个没有收到 ACK 报文的位置;
发送窗口中未确认到达的报文何时重传?
- 报文在一个 RTO 时间内仍未确认到达,就会重传。报文 RTO 初始值是 rx_rto ,会持续增长,速率支持配置。
2.2 接收
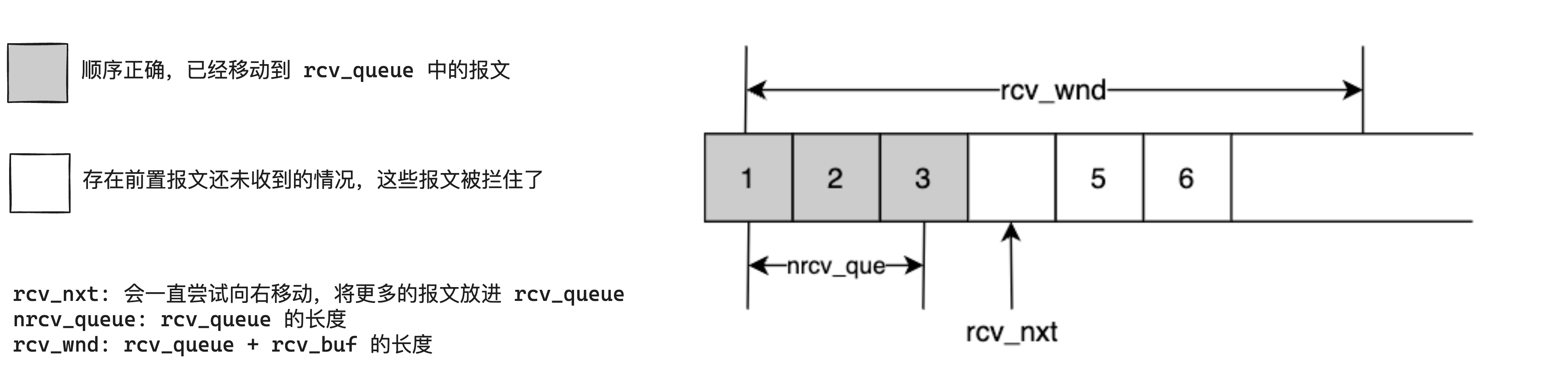
- 每收到一个数据报文, 都会根据它的编号将它插入到
rcv_buf对应的位置中; - 接着检查
rcv_nxt能否向右移动, 只有当报文的顺序正确且连续才能移动; - 在上图的例子中由于 4 号报文的缺失,
rcv_nxt只能处于 4 号位置等待,5, 6 号报文也不能移动到rcv_queue中; - 等到 4 号报文到达后,才能将 4, 5, 6 号报文一并移动到
rcv_queue中,同时rcv_nxt会右移到 7 号位置。
2.3 案例分析
我们举个简单的例子演示整个 ARQ 的流程。下图中实线箭头表示数据报文,虚线箭头表示 ACK。

① t1 时刻发送方发送 1 号报文, 1 号报文放入发送缓冲区中, snd_una 指向 1, snd_nxt 指向 2.
② t2 至 t3 时刻发送方依次发送 2 至 3 号报文, snd_nxt 依次后移.
③ 1 号报文丢包.
④ t4, t5 时刻接收方收到 3 号和 2 号报文, 放入 rcv_buf 中; 随后回复 3 号和 2 号 ACK. 此时由于 1 号报文缺失, rcv_nxt 始终指向 1.
⑤ 3 号 ACK 丢包.
⑥ t7 时刻发送方收到 2 号 ACK, 将 2 号报文标记为已送达. 此时由于 3 号 ACK 丢包, 3 号报文未标记为已送达. 由于 1 号报文未确认送达, snd_una 亦指向 1.
⑦ t8 时刻 1 号报文超时, 重传.
⑧ t9 时刻接收方收到 1 号报文, 放入 rcv_buf 中; 这时 1, 2, 3 号报文顺序正确, rcv_nxt 右移到 4 号位置. 接收方回复 1 号 ACK, 同时带上 una = 4.
⑨ t10 时刻发送方收到 1 号 ACK, 将 1 号报文标记为已送达. 同时 una 表明 1, 2, 3 号报文均已送达, 因此也将 3 号报文标记为已送达. snd_una 移动到 4.
3. 超时重传
超时重传是当发送的数据包在预定时间内未被确认时,重新发送该数据包的机制。在 KCP 中,这个时间由重新传输超时(RTO)决定。KCP 计算 RTO 初始值的方法是 TCP 的标准方法, 规定在 RFC 6298 中。
这里还是贴出源码讲比较直观:
1 | |
这个计算过程笔者就不做详细介绍了,代码里面的公式读者可以尝试自行画图进行理解,这里就不花大篇幅画公式了,下面我尝试以更通俗易懂的话语解释 RTO,只需要理解它在做什么,为什么这么做,就可以了,个人觉得对公式的细节可以暂且忽略。
3.1 RTO 计算目的
KCP 的 RTO 计算是为了确定在多长时间内未收到确认(ACK)时,应该重新发送数据包。这段时间被称为重传超时时间(RTO)。计算 RTO 的目的是在网络条件变化的情况下,既能快速响应数据丢失,也能避免不必要的重传,从而保持高效的传输。
3.2 RTO 计算涉及的变量解释
RTT 和 SRTT 的概念:
- RTT(Round-Trip Time): 是从发送一个数据包到收到其确认(ACK)所花的时间。
- SRTT(Smoothed RTT): 是 RTT 的加权平均值,它代表了 RTT 的一个更稳定的估计值。SRTT 的目的是减少 RTT 的短期波动对 RTO 的影响。
RTT 变化值(RTT variance):网络传输时间并不总是固定的,有时会因为网络拥塞或其他原因出现波动。我们通过计算 RTT 变化值(RTT variance)来估计这种波动的大小。
为什么需要 SRTT 和 RTT 变化值:
- SRTT 给我们一个平均的 RTT 估计值。
- RTT 变化值告诉我们网络的波动性。如果波动很大,我们希望 RTO 更大,以免因为短暂的网络延迟就触发不必要的重传。
3.3 RTO 计算步骤
1. 初始化:初次计算时,我们没有历史 RTT 值,所以直接用第一次测量的 RTT 来初始化 SRTT,并将 RTT 变化值设为 RTT 的一半。
2. 更新 SRTT 和 RTT 变化值:
- 每次我们测量新的 RTT,就用它来更新 SRTT 和 RTT 变化值。
- 更新 SRTT:我们不直接替换旧的 SRTT,而是用一个平滑的方式(即加权平均),使得 SRTT 逐渐靠近新 RTT,但又不会剧烈变化。
- 更新 RTT 变化值:计算新的 RTT 与 SRTT 的差值,用这个差值来更新 RTT 变化值,使其反映当前网络波动的大小。
3. 计算 RTO:
- 用 SRTT 加上四倍的 RTT 变化值来计算 RTO,这样可以确保 RTO 足够长,能涵盖大部分的网络波动。
- 我们还要确保 RTO 不小于一个最小值(
rx_minrto),以防止 RTO 过小导致频繁重传;也不能大于一个最大值(IKCP_RTO_MAX),以防止 RTO 过大影响响应速度。
4. RTO 计算效果
- 稳定的传输: SRTT 提供了一个稳定的平均 RTT 估计,使得 RTO 能适应网络的长期变化。
- 适应网络波动: RTT 变化值使得 RTO 能够应对网络的短期波动,减少因短暂延迟而导致的重传。
- 快速响应: RTO 设置合理后,能够在数据丢失时快速重传,保持传输的高效和及时性。
通过这样的计算方式,KCP 能够在不同的网络条件下,自动调整重传策略,从而在保证数据可靠性的同时,保持较高的传输效率。
4. 快速重传
在网络传输中,数据包可能会由于网络拥塞、丢包等原因而丢失。超时重传依赖于重传超时时间(RTO)来判断是否需要重传,这可能会导致响应延迟。而快速重传通过检测重复的确认包(ACK)来快速判断数据包的丢失,并立即触发重传,显著缩短了数据丢失的恢复时间。

4.1 何时快速重传?
- 每个报文的
fastack记录了它检测到 ACK 失序的次数,每当 KCP 收到一个编号为 sn 的 ACK 时,就会检查 snd_buf 中编号小于 sn 且未确认送达的报文,并将其fastack加 1。 - 可以通过配置
fastresend指定失序多少次就执行快速重传。 - 每次调用 ikcp_flush 都会重传 snd_buf 中
fastask >= fastresend的报文。
4.2 无限快速重传吗?
- 每个报文的
xmit记录它被传输的次数,可以配置fastlimit规定传输次数小于fastlimit的报文才能执行快速重传。
5. 比较 TCP 的超时重传和快速重传
TCP 也实现了类似的机制,但在复杂性和应用场景上有所不同。
5.1 TCP 的超时重传
1. RTT 估算:
TCP 通过接收确认包来估算 RTT,并使用 RTT 的变化范围来计算 RTO。
TCP 使用 Jacobson/Karels 算法进行 RTT 估算和 RTO 计算:
1
2
3
4// SRTT and RTTVAR calculation
RTTVAR = (1 - β) * RTTVAR + β * |RTTsample - SRTT|
SRTT = (1 - α) * SRTT + α * RTTsample
RTO = SRTT + 4 * RTTVAR其中,SRTT 是平滑的 RTT,RTTVAR 是 RTT 的变化范围,α 和 β 是权重因子。
2. 重传策略:
- 如果在 RTO 时间内未收到 ACK,TCP 会重传未确认的数据包。
- 每次重传,RTO 值会按照指数增长(指数退避算法)。
3. 拥塞控制:
- TCP 使用复杂的拥塞控制机制,如慢启动、拥塞避免等,来调整发送窗口和传输速率。
5.2 TCP 的快速重传
- 当接收到三个重复的 ACK 时,TCP 会立即重传丢失的数据包,而不等待 RTO 超时。
- 快速重传后,TCP 进入快速恢复状态,调整拥塞窗口,避免拥塞窗口过度收缩。
5.3 比较分析
| 特性 | KCP | TCP |
|---|---|---|
| RTT 估算 | 基于加权移动平均,较为简单 | 使用 Jacobson/Karels 算法,复杂但精确 |
| RTO 计算 | 简化的计算公式 | 基于 RTT 的复杂计算 |
| 重传机制 | 超时重传和快速重传 | 超时重传和快速重传 |
| 拥塞控制 | 简单的拥塞控制,适合低延迟应用 | 复杂的拥塞控制,适合广泛的传输场景 |
| 适用场景 | 实时应用,如游戏、视频会议 | 通用应用,如文件传输、HTTP |
| 实现复杂度 | 较为简单,易于理解和实现 | 复杂,需处理更多的网络状态和控制 |
| 可靠性 | 依赖于用户自定义的重传和控制策略 | 内置可靠性和流控制机制 |
| 响应速度 | 高效快速,适用于低延迟和高吞吐量场景 | 可靠但响应速度较慢,适合稳定传输场景 |
KCP 和 TCP 都提供了可靠的传输机制,但它们适用于不同的应用场景。KCP 设计简单,适合对延迟敏感的实时应用,而 TCP 拥有完善的拥塞控制和可靠性机制,适合广泛的网络应用。
6. 拥塞控制
拥塞控制是网络传输协议中的一个重要机制,用于防止发送过多的数据包导致网络拥塞。在
KCP
中,拥塞控制相对简单,主要通过发送窗口(snd_wnd)和拥塞窗口(cwnd)来管理数据发送速率。
6.1 三种策略
KCP 有 3 种拥塞控制的策略:
- 慢启动(slow start)
- 拥塞避免(congestion avoidance)
- 快速恢复(fast recovery)
慢启动:先将 cwnd 设置为 1,随后平均每经过一个 RTT
时间,cwnd = cwnd * 2,直到阈值 ssthresh。
拥塞避免:cwnd 到 ssthresh 后,cwnd
呈线性增长。
当慢启动或者拥塞避免造成 丢包 后,就采取相应的退让策略:
fastack >= fastresend-> 发生快速重传:将ssthresh = cwnd / 2,cwnd = ssthresh + fastresend进入快恢复。current >= resentts-> 超时重传:ssthresh = ssthresh / 2,cwnd = 1,进入慢启动。

6.2 核心概念
KCP 的拥塞控制基于以下几个核心概念:
- 发送窗口
(
snd_wnd):表示发送端在未收到接收端确认之前,允许发送的数据包的数量。它类似于 TCP 中的发送窗口,控制了数据流的速率。 - 接收窗口
(
rcv_wnd):表示接收端能够处理的最大数据包数量。发送端通过接收端的窗口大小来调整自己的发送速率。 - 远端窗口
(
rmt_wnd):表示接收端的窗口大小,发送端会根据这个值调整自己的发送窗口,以避免发送的数据超出接收端的处理能力。 - 拥塞窗口
(
cwnd):用于控制传输中的数据包数量。它基于网络的拥塞情况动态调整,以避免网络拥塞。 - 慢启动阈值
(
ssthresh):用于确定拥塞控制的模式。当cwnd小于ssthresh时,KCP 处于慢启动模式,否则进入拥塞避免模式。
6.3 窗口探测(Window Probing)
在某些情况下,接收端的窗口可能会被关闭(即 rmt_wnd 为
0),这意味着接收端无法接收任何新的数据。为了应对这种情况,KCP
实现了窗口探测机制:
- 当
rmt_wnd为 0 时,KCP 不会立即停止发送数据,而是会定期发送一个探测包,以检测接收端窗口是否已经打开。 - 这个探测包会触发接收端返回一个 ACK,其中包含最新的接收窗口大小信息。
6.4 调节和配置
KCP 的拥塞控制机制提供了一些配置参数,用户可以通过调整这些参数来优化传输性能:
snd_wnd: 发送窗口大小,用户可以根据应用的需求调整该值,以控制数据发送的最大量。rcv_wnd: 接收窗口大小,表示接收端能够处理的最大数据包数量。ssthresh: 慢启动阈值,初始值通常设置为较大的一个常量,用户可以根据网络情况调整。cwnd: 拥塞窗口大小,初始值通常设置为 1,随传输情况动态调整。
7. 比较 TCP 的拥塞控制
7.1 四个阶段
TCP 拥塞控制有四个关键阶段
慢启动(Slow Start):
- 目的:快速探测网络的可用带宽。
- 机制:当一个连接刚建立或者从丢包恢复时,
cwnd(拥塞窗口)从一个较小的值(通常是 1 个 MSS,即最大报文段大小)开始,并以指数增长的方式增加。 - 过程:每次收到一个 ACK,
cwnd增加一个 MSS,使得cwnd每 RTT 增加一倍,直到cwnd达到慢启动阈值(ssthresh)。
拥塞避免(Congestion Avoidance):
- 目的:逐步探测网络的最大容量,并避免拥塞。
- 机制:当
cwnd达到或超过ssthresh时,TCP 进入拥塞避免阶段,此时cwnd以线性增长的方式增加。 - 过程:每个 RTT,
cwnd增加1/cwnd个 MSS,这种增长方式较为保守,旨在防止过度发送导致的拥塞。
快速重传(Fast Retransmit):
- 目的:快速响应丢包,提高传输效率。
- 机制:当发送端收到三个重复的 ACK 时,立即重传被确认丢失的数据包,而不等待 RTO 超时。
- 过程:快速重传的目的是迅速恢复丢失的数据包,从而减少因丢包导致的等待时间。
快速恢复(Fast Recovery):
- 目的:在拥塞后快速恢复到适当的传输速率。
- 机制:在快速重传后,TCP
不会直接进入慢启动,而是保持
cwnd的一部分,以较快的速度恢复到拥塞避免状态。 - 过程:将
ssthresh设置为当前cwnd的一半,cwnd被临时减小,然后在接收新 ACK 时快速增加cwnd,直到恢复到ssthresh为止。
7.2 比较分析
| 特性 | TCP | KCP |
|---|---|---|
| 实现复杂度 | 复杂,包含多个阶段和算法 | 简单,主要通过窗口大小控制 |
| 拥塞检测 | 通过 RTT 估算和 ACK 检测丢包 | 主要通过 ACK 和窗口大小检测丢包 |
| 响应速度 | 响应相对较慢,适合稳定传输 | 响应较快,适合实时性高的传输 |
| 适应性 | 能适应广泛的网络条件 | 适应性较好,但更适合低延迟网络 |
| 配置灵活性 | 较为固定,依赖于系统配置和优化 | 提供更多的配置选项,用户可根据需求调整 |
| 应用场景 | 适用于各种需要可靠传输的应用 | 适用于实时性要求高的应用,如游戏和视频会议 |
| 窗口调整 | 慢启动、拥塞避免、快速重传、快速恢复等机制 | 主要通过发送窗口和拥塞窗口调整 |
| 丢包响应 | 丢包时通过减小 cwnd 和 ssthresh
来调整 |
丢包时迅速调整 cwnd 和重传 |
| 拥塞控制策略 | 慢启动、拥塞避免、快速重传、快速恢复等多种策略 | 主要通过调整 cwnd 和 ssthresh
进行简单控制 |
| 优点 | 稳定可靠、机制全面、应用广泛 | 实现简单、响应快、灵活性高、适合实时应用 |
| 缺点 | 复杂、响应慢、初始阶段保守 | 无法应对更加复杂的网络状况、应用场景有限 |
TCP 和 KCP 都有各自的拥塞控制机制,适用于不同的应用场景。TCP 提供了复杂而全面的拥塞控制,适合于各种网络条件下的可靠传输,而 KCP 提供了简单高效的控制机制,适合于低延迟和高响应速度的实时应用。选择使用哪种协议取决于具体的应用需求和网络环境。
源码分析
1. 核心数据结构
1.1 IKCPSEG 报文段结构
1 | |
1.2 IKCPCB 控制块
1 | |
这个结构体可以大致分为几个主要部分:
- 基础配置:包含基本的会话标识和传输单元大小设置
- 序号追踪:用于追踪发送和接收的包序号
- 时间管理:包含各种时间戳和定时器
- 窗口控制:实现流量控制和拥塞控制
- 队列管理:管理数据的发送和接收
- ACK处理:处理确认包
- 配置选项:各种功能开关和参数设置
- 回调函数:用于数据输出和日志记录
2. 核心函数
在进入具体的核心函数分析之前,需要先点明 2 点,kcp
的实现者期望其尽可能地简单和减少依赖,所以数据的输出甚至是当前时间都是由使用者来设置的,即
kcp 本身是不依赖于机器时钟的。具体体现在下面 2 个函数:
1 | |
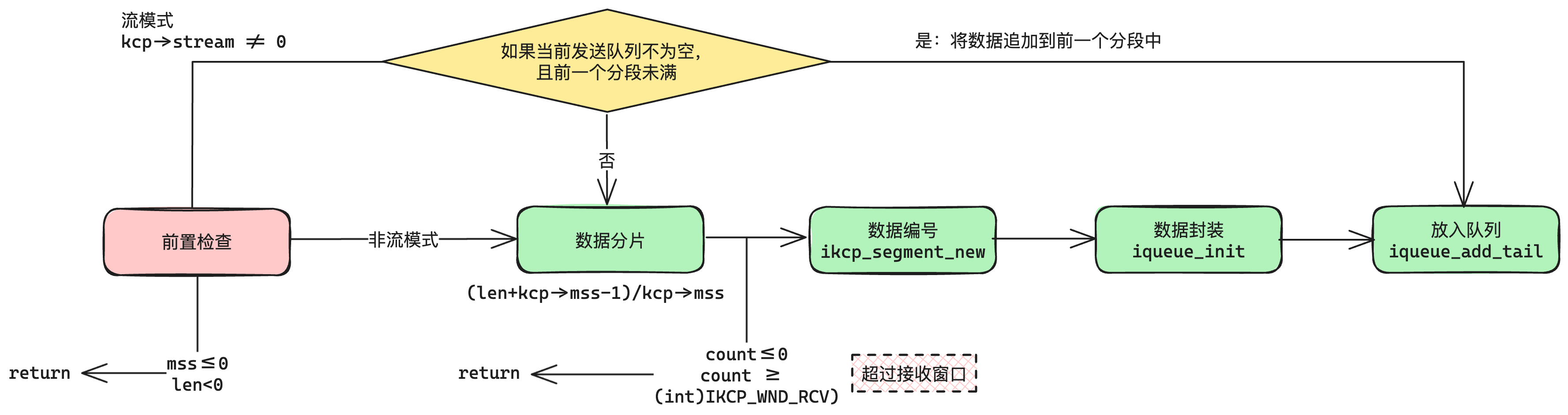
2.1 ikcp_send 发送数据
ikcp_send
是应用层接口,负责将用户数据分片并加入到发送队列(snd_queue)。
1 | |
2.2 ikcp_input 接收数据
ikcp_input 负责处理从网络接收到的原始 KCP
数据包,它会处理协议层面的数据,包括
ACK、窗口控制等协议信息,并将接收到的数据放入 KCP
的内部接收缓冲区(rcv_buf 和 rcv_queue)。
2.3 ikcp_recv 获取数据
ikcp_recv
是应用层函数,供上层应用调用以获取完整的消息数据,它从 KCP
的接收队列(rcv_queue)中读取已经排序好的数据,处理分片重组,确保返回完整的消息。
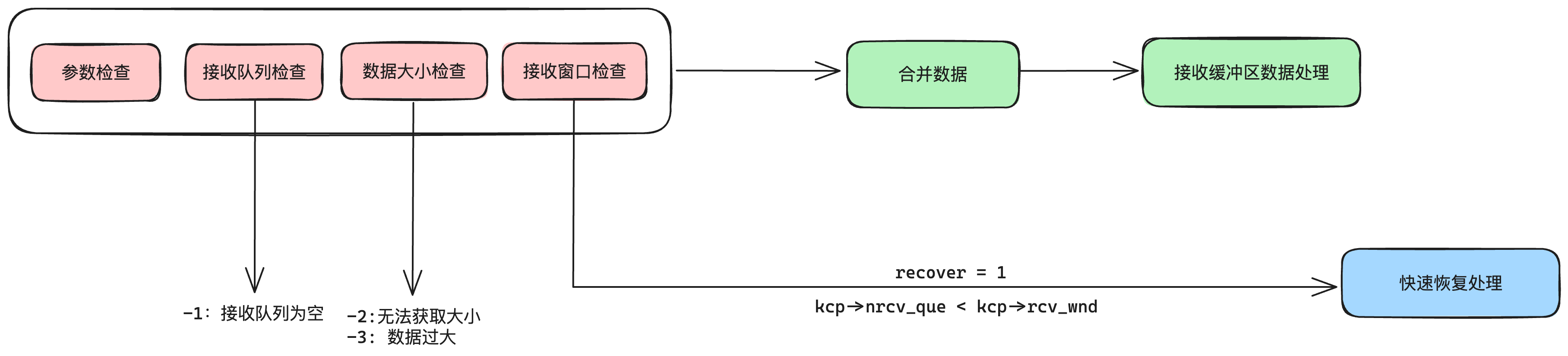
1 | |
2.4 ikcp_update 定时时钟
前面我们看了 ikcp_send 、ikcp_input 和
ikcp_recv
三个核心流程的函数,其中的一些细节,你可以回到本文前面的「原理分析」再对照源码仔细阅读。
在前面的原理分析中,我们提到,为了提高传输和处理数据的效率,kcp
设计了队列和缓冲区,同时为了实现可靠性,kcp 也提供了
ACK
和重试、拥塞控制等机制,这些事情都是周期定时去处理的。这里是由
ikcp_update 函数去处理的。
ikcp_update 是 KCP 的定时器函数,负责以固定间隔调用
ikcp_flush 处理数据发送和协议更新,是 KCP
的"心跳"机制。
1 | |
这个函数很简单,根据注释所说,通常情况下会每 10ms~100ms
执行一次,然后核心是去调用 ikcp_flush
函数,所有的逻辑都在里面。
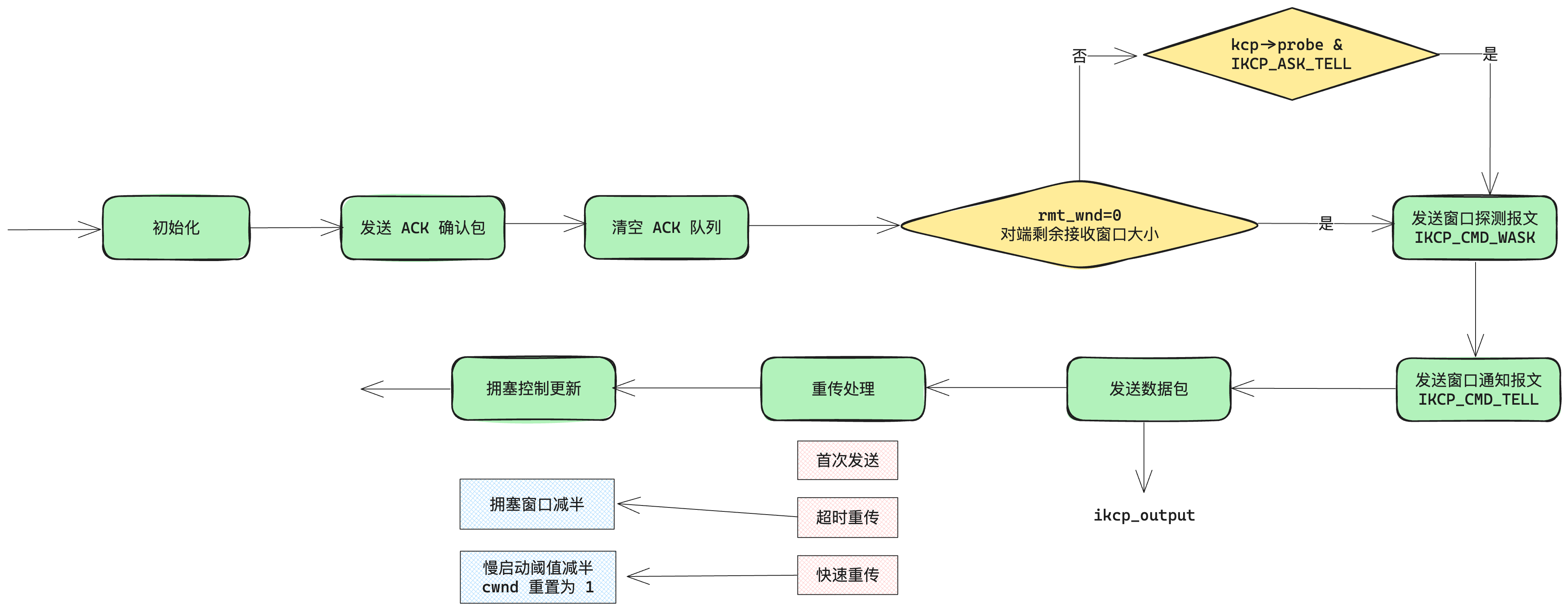
2.5 ikcp_flush 定时处理
如上所述,ikcp_flush 是 KCP
的核心发送函数,负责将发送队列 snd_queue
中的数据移入发送缓存 snd_buf 并通过 output
回调发送出去,同时处理 ACK
发送、快速重传、超时重传和窗口探测等协议细节。
1 | |